您现在的位置是:主页 > 光电 > 其他光电实用电路图 >
安装机械连杆到机器人的伺服电机上-其他光电实用电路图
发布时间:2022-09-14 19:56:13所属栏目:其他光电实用电路图 已帮助人编辑作者:电路图知识网
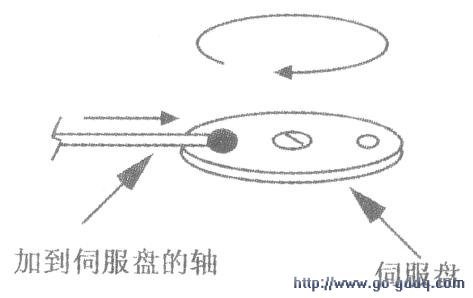
用R/C伺服电机驱动机器人的最大优点之一是将机器人有关零件连接到伺服电机有几种方法。在模型飞机和汽车应用中,典型的是伺服电机连接到某种推/拉连杆上。例如在模型飞机中,控制舵的伺服电机可直接连到安装在舵上的连杆。随着伺服电机的旋转,连杆拉前推后,把旋转运动转换到直线运动,如图所示。舵是用铰链接到飞机机体上,这样连杆运动,舵就前后拍动。可以把模型飞机和汽车硬件设计方法应用到机器人中。
Tags:
相关文章


其他光电实用电路图相关资讯

微波多层板反钻孔之金属化孔互连-其他光电实用电路图
对讲机发射功率测试笔的制作-其他光电实用电路图
电子扩音机安装后的电压检测与调整-其他光电实用电路图

用6N7P电子管制作的单端功率放大器-其他光电实用电路图
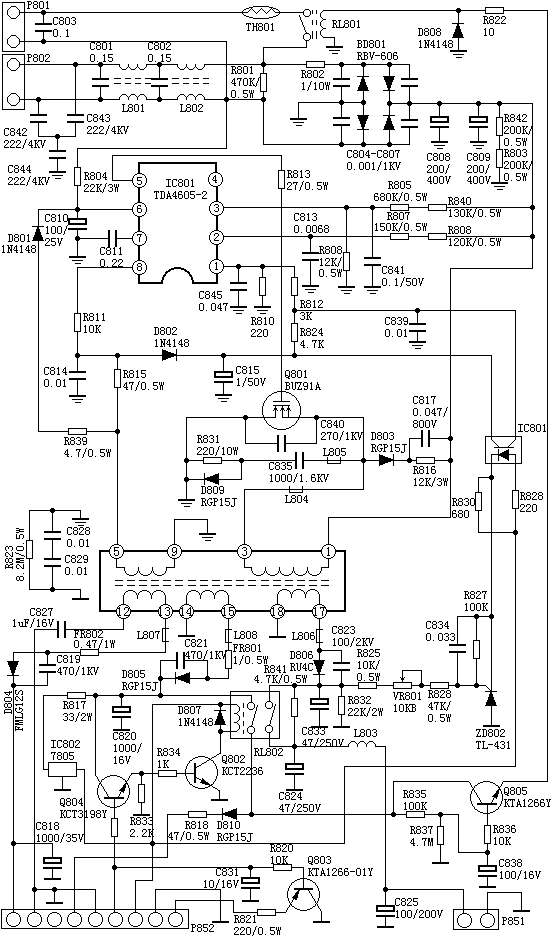
采用TDA4605-2制作的开关电源-其他光电实用电路图
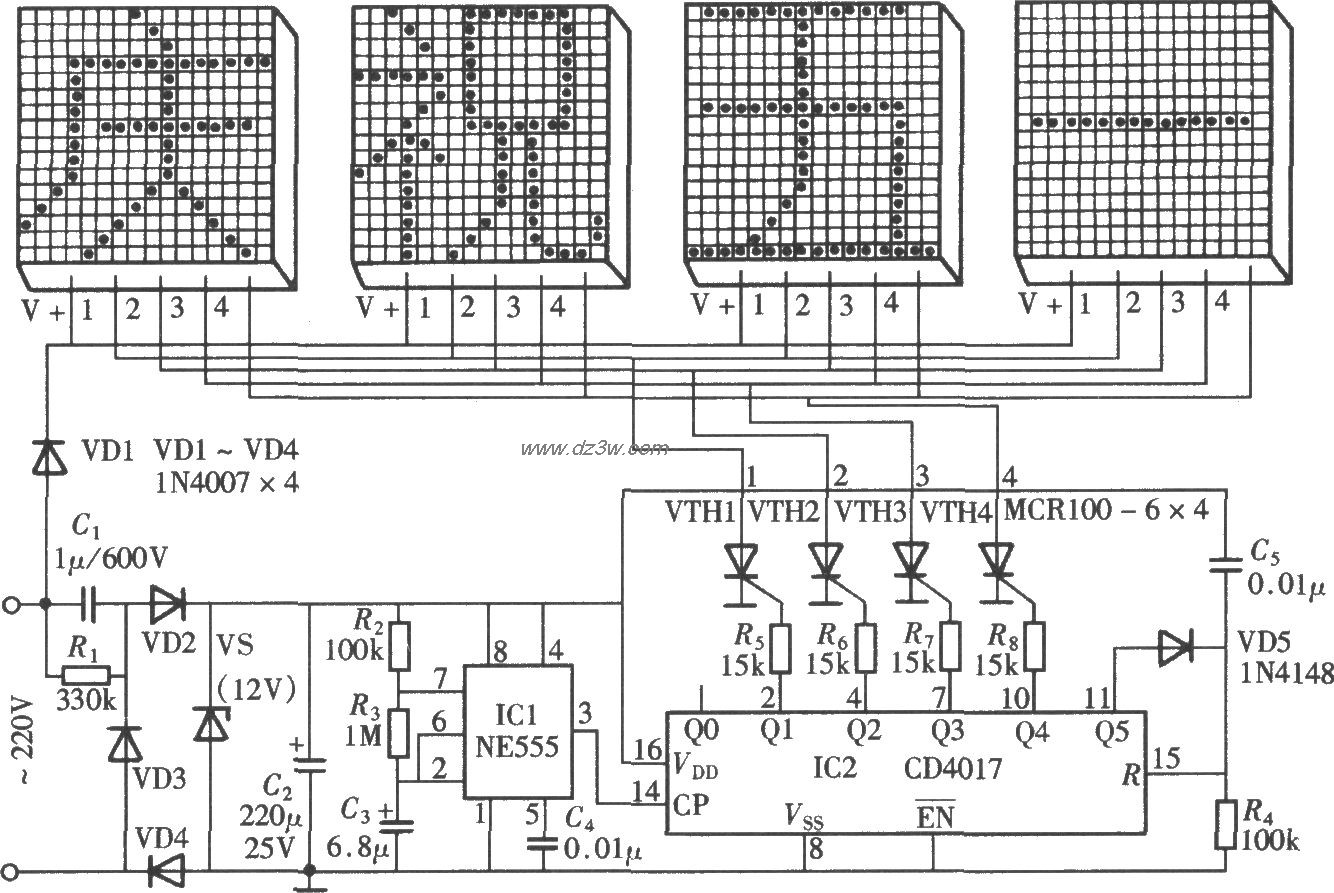
由NE555、CD4017组成的节-其他光电实用电路图
选频声控开关电路设计与分析-其他光电实用电路图
用分立元件制作的耳聋助听器-其他光电实用电路图
庭院太阳能照明灯电路-其他光电实用电路图
9800系列UHF发射单元的制作方法-其他光电实用电路图

选择性去桥连技术提高焊接成品率-其他光电实用电路图
用PROG-110设计制作的多媒体投影机自动控制器-其他光电实用电路图
卡拉OK人声增效电路-其他光电实用电路图
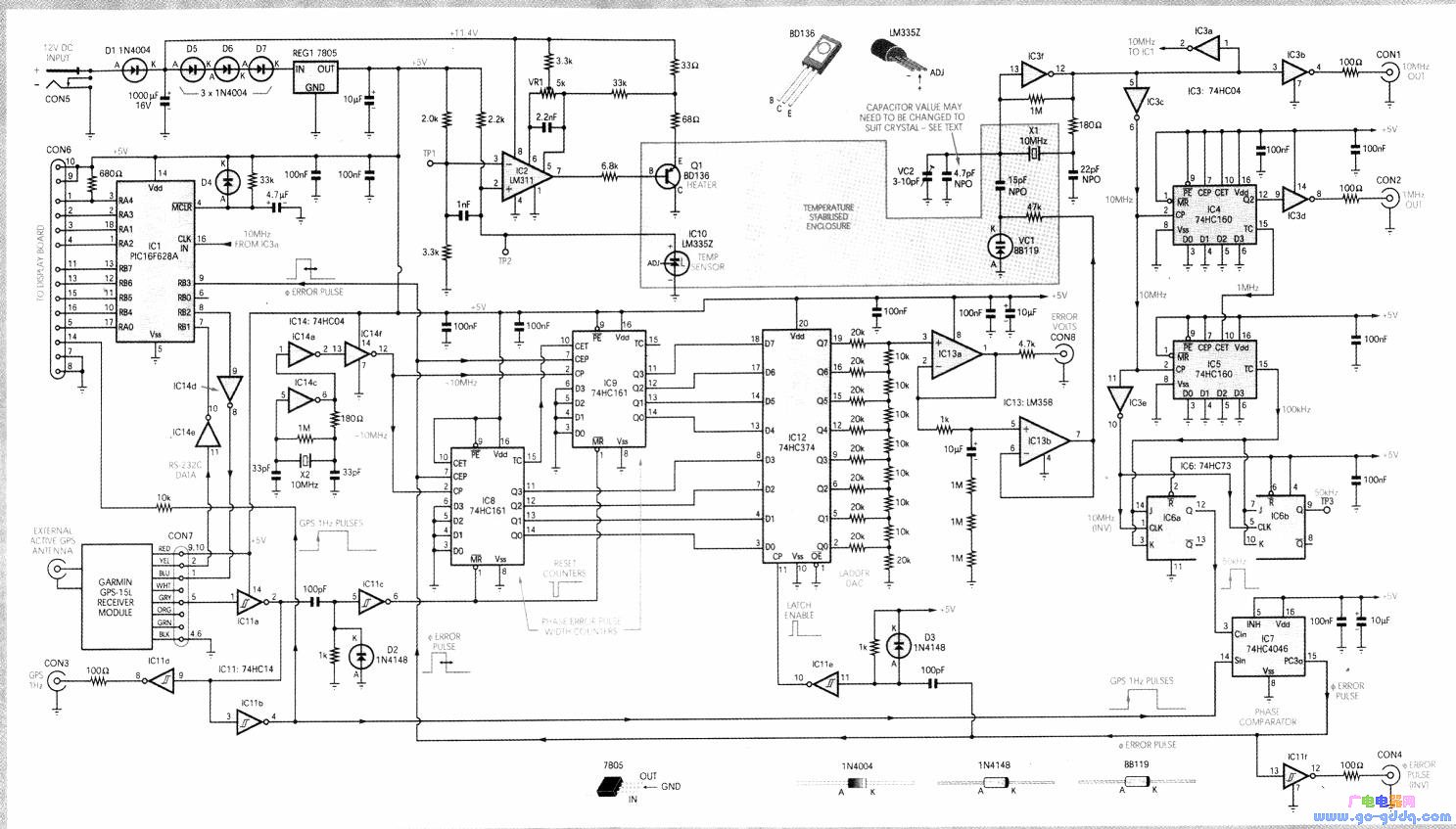
基于定位系统基准频率源的设计与制作-其他光电实用电路图
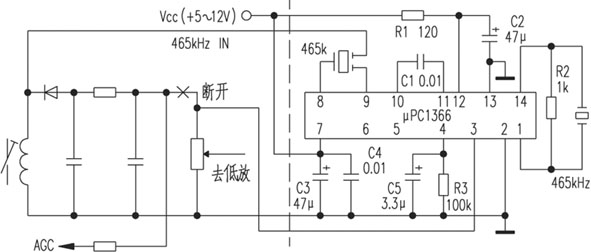
用μPC1366提高收音机灵敏度-其他光电实用电路图